Le but du radar balayeur est de visualiser sur un écran la distance des objets à proximité.
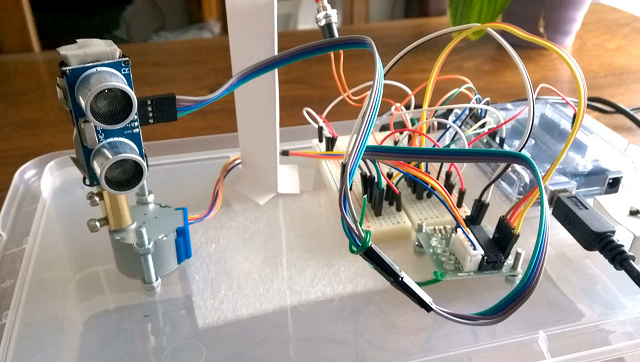
Le matériel utilisé :
- une carte micro-contrôleur ARDUINO UNO R3.
- un module à ultrasons HC-SR04.
- un moteur pas à pas 28BY J-48 et sa carte de pilotage à base de ULN2003.
- une alimentation 5 volts continu pour le moteur pas à pas.
- un port de communication série pour exporter les mesures effectuées vers l’ordinateur chargé de la visualisation.
Fonctionnement :
Le moteur pas à pas, commandé par la carte ARDUINO, effectue un balayage de gauche à droite couvrant le champ exploré, puis le balayage inverse, et ainsi de suite.
Lors de ces balayages, il effectue une pose après chaque rotation d’un angle prédéfini.
Lors de chaque pose, le module à ultrasons mesure la distance le séparant de l’objet qui se trouve dans son “champ de vision” et transmet le résultat de cette mesure à l’ordinateur de visualisation par le port série.
A la fin de chaque balayage, l’ordinateur de visualisation trace le graphique des mesures effectuées lors du balayage.
Radar balayage Ultra-sons
Particularités de fonctionnement :
- Entre deux utilisations, le moteur est arrêté à un emplacement indéterminé.
- Au démarrage, il est donc nécessaire de recaler le moteur toujours dans la même position initiale (origine de toutes les mesures d’angle qui vont suivre).
- Ce positionnement est effectué par la recherche à l’aide du module ultrasons d’un objet très proche (cet objet est un simple morceau de carton fixé à proximité du module)
- Le moteur pas à pas est piloté par la carte à base d’ULN2003 selon le mode de commande par demi pas. Chacun des quatre fils de commande de la carte reçoit dans un ordre bien défini les 8 groupes d’impulsions qui permettent de faire tourner le moteur de un tour dans un sens.
- Ces impulsions sont initiées par la carte ARDUINO sur quatre de ses sorties.
- Le module à ultrasons est, quant à lui, piloté par une sortie de la carte ARDUINO qui déclenche une nouvelle mesure. Le résultat de cette mesure est récupéré par la carte ARDUINO grâce à une de ses entrées.
Aménagements :
Le module à ultrasons est fixé directement sur l’axe démultiplié du moteur pas à pas pour pouvoir effectuer le balayage nécessaire.
La démultiplication est importante : il faut 250 tours du moteur pour 180 degrés de rotation de l’axe sur lequel est fixé le module à ultrasons.
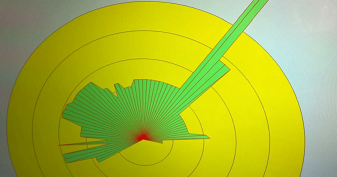
Les cercles concentriques représentent des distances de 1 mètre, 2 mètres, etc. entre le module ultrasons et l’objet détecté.